La première étape dans un projet de sécurisation de son SI industriel est bien souvent la création, ou la fiabilisation, d’un inventaire de l’ensemble des composants. En effet, l’inventaire et la documentation existante peuvent s’avérer insuffisant ou non-fiable.
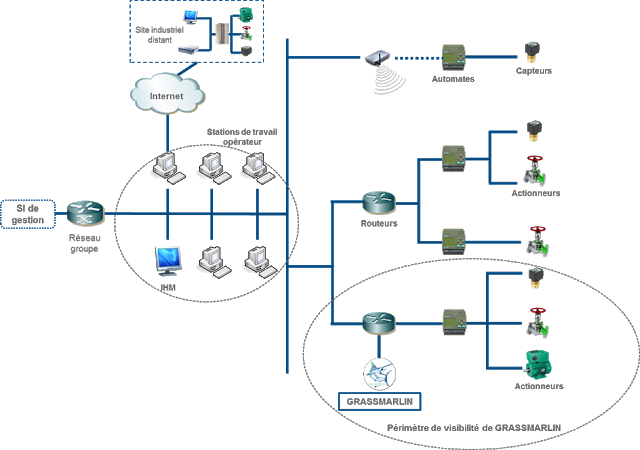
C’est à ce besoin que répond l’outil GRASSMARLIN en fournissant une solution de cartographie réseau passive adaptée au secteur industriel.
Présentation de GRASSMARLIN
GRASSMARLIN est un outil permettant de cartographier de manière passive un réseau industriel. Cet outil, premièrement développé par la National Security Agency (NSA) des États-Unis est désormais Open-Source et directement accessible sur GitHub (https://github.com/iadgov/GRASSMARLIN).
L’outil GRASSMARLIN permet d’obtenir une image ou « snapshot » du système d’information (SI) industriel avec notamment:
- Les équipements présents
- Les communications existantes entre les équipements
- Des méta-informations obtenues à partir des communications (localisation, constructeurs)
L’outil est disponible sur la plateforme Windows (version 7+, 64bits uniquement), certaines distributions Linux (Fedora, Ubuntu) et est téléchargeable au lien suivant : https://github.com/iadgov/GRASSMARLIN/releases/latest.
Une perte de disponibilité d’un équipement du SI industriel pouvant avoir des conséquences importantes (arrêt de la production, perte de visibilité pour les opérateurs, …), la cartographie est entièrement passive. Les communications sont enregistrées puis analysées, contrairement à un scan actif avec nmap ou plcscan qui vont activement envoyer des paquets à destination de toutes les adresses IP et analyser les éventuels retours.
Fonctionnement de Grassmarlin
GRASSMARLIN permet d’obtenir deux types de topologies du réseau industriel :
- La « Logical View » : fournit une liste des équipements présents et des communications existantes, nommée par la suite la vue logique.
- La « Physical View » : permet d’obtenir les liens physiques entre les équipements en donnant par exemple le numéro de port d’un routeur auquel un automate est connecté, nommée par la suite la vue physique.
La détection passive
La méthode de découverte de réseau étant passive l’outil GRASSMARLIN ne génère aucun trafic sur le réseau. Ainsi afin d’obtenir des résultats de la vue logique ce dernier va simplement écouter les communications sur le réseau tel un analyseur de trame classique. En d’autres termes, GRASSMARLIN ne pourra analyser que les communications qu’il est en mesure d’écouter sur sa machine hôte.
Il est aussi possible d’obtenir une topologie réseau à partir de captures réseaux (fichiers PCAP) générées à des instants ultérieurs à d’autres points du réseau.
De même, pour générer la vue physique GRASSMARLIN utilise des logs de routeur Cisco et reste donc totalement passif.
Vue logique
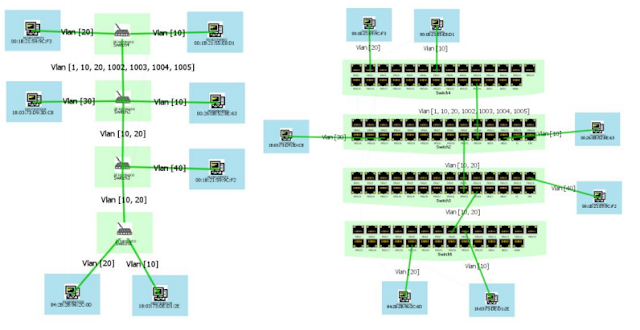
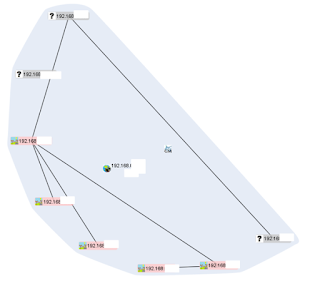
Dans cette vue, la topologie du réseau se présente comme suit :
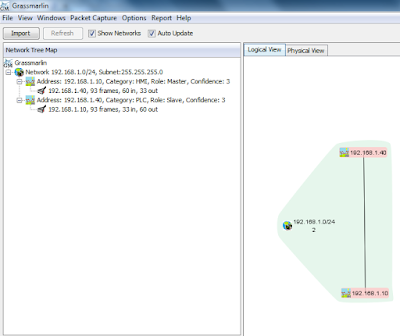
La carte principale à droite permet de donner les équipements présents, identifiés par leur adresse IP, ainsi que les communications existantes entre les équipements et les sous-réseaux IP.
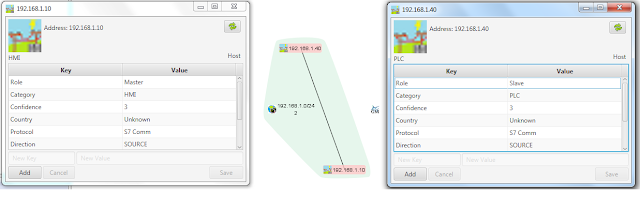
Par ailleurs, GRASSMARLIN reconnait à l’aide de signatures les protocoles et équipements industriels :
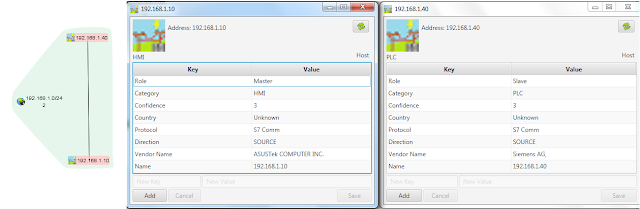
Dans le cas présent, le protocole utilisé est bien reconnu comme S7comm. Le rôle des équipements dans les communications est aussi informé : le master (ou maître) donne les consignes lorsque le slave (ou esclave) exécute les commandes. Le Vendor Name (nom du constructeur) est donné et permet aux gestionnaires de parcs industriels de pouvoir se repérer plus aisément. Enfin, dans le cas où les adresses IP sont publiques (ce qui n’est pas le cas ici) le pays d’origine de l’équipement est informé.
Ces informations sont générées suite à la confrontation des captures réseaux avec les signatures connues par GRASSMARLIN, l’attribut Confidence (confiance) échelonné de 1 (non confiant) à 5 (confiant) informe alors sur le degré de véracité des informations données.
GRASSMARLIN fournit aussi une vision textuelle de la carte à l’aide d’un arbre de connections (présent à gauche sur la figure 2) renseignant les équipements par sous-réseaux.
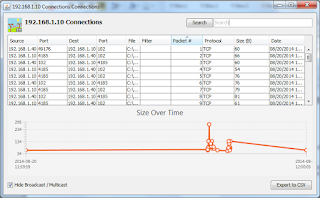
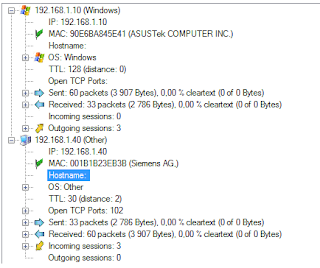
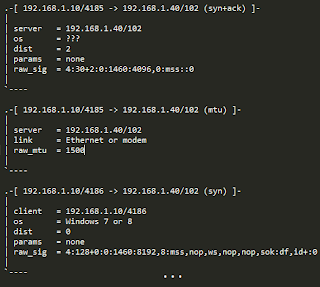
Il est aussi possible d’isoler les communications liées à un équipement en particulier et d’obtenir des premiers éléments d’analyses tels que : la taille des paquets échangés, l’instant t de l’échange, l’origine du paquet (si plusieurs fichiers PCAP’s sont utilisés) :
Signatures protocolaires
GRASSMARLIN embarque des signatures permettant de reconnaitre les protocoles utilisés sur la vue logique.
Chaque signature peut être composée de deux types d’élément :
- L’élément Filter (ou filtre) qui décrit un attribut à détecter.
- L’élément Payload (ou charge utile) qui permet de retourner des informations à l’utilisateur.
Une signature peut contenir plusieurs Filter et chaque Payload fait référence à un Filter :
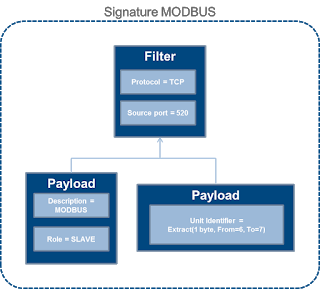
Figure 5 : Exemple de signature MODBUS
Les Filter permettent essentiellement de décrire des attributs protocolaires des couches 2 à 4 du modèle OSI. Voici une liste des Filter actuellement disponibles :
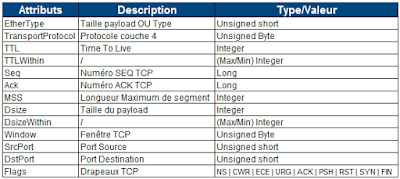
Les Payload quant à eux permettent de rajouter une description à un élément réseau, d’extraire des valeurs d’un paquet ou encore d’afficher une information en fonction de la présence d’un motif dans un paquet.
La version actuelle de GRASSMARLIN (v3) compte 54 signatures couvrant les protocoles industriels couramment utilisés. Du fait du récent passage de l’outil en open-source (28/01/16) il est probable que la bibliothèque de signature s’enrichisse avec les années à venir.
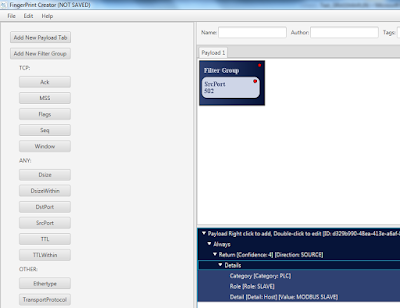
Les signatures sont éditées sous le format XML néanmoins un outil graphique est proposé – FingerPrint Editor – afin de permettre une création plus aisée de signatures :
Vue physique
La topologie physique permet d’obtenir les connexions physiques existantes entre les équipements.
Ces vues, plus orientées connectivité réseau, permettent d’obtenir les liaisons physiques existantes entre les équipements industriels et leurs connexions aux équipements réseaux.
À ce jour seul les routeurs Cisco sont supportés et les vues sont générées à partir des résultats des 3 commandes suivantes :
- “show running-config”
- “show ip arp” (OU) “show mac address-table”
- “show interfaces”
Une fois la sortie de ces commandes enregistrée dans un fichier texte, GRASSMARLIN est en mesure de générer à partir de ce dernier la vue physique.
Partage de données
L’exportation des données est gérée par GRASSMARLIN avec 3 types d’export
- L’exportation des vues sous format d’images (PNG).
- L’exportation des données sous format XML :
- Enregistre l’ensemble de l’arbre de connexion de la vue logique.
- Ces données peuvent être utilisées comme des données de session lors de prochaine importation.
- L’exportation des données en partage : création d’une archive avec les données sous format XML et les fichiers de captures réseaux générés.
Tests sur banc d’essai
Des tests sur une des maquettes SI industriel de Solucom ont été réalisés afin de confronter l’outil à un cas d’utilisation concret avec de réels équipements industriels.
Présentation banc d’essai
Le banc d’essai simule un aiguillage de train et est composé de :
- 1 interface homme/machine (IHM) Siemens ;
- 1 automate Siemens ;
- 2 automates Schneider ;
- 1 switch manageable.
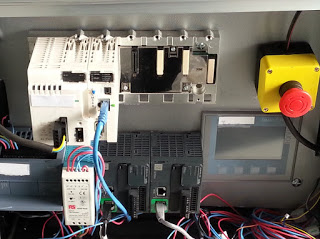
Un poste de travail disposant de Grassmarlin est directement connecté à un port en mirroring sur le switch et accède donc à l’ensemble des communications de la maquette. Par ailleurs, aucun équipement Cisco n’étant présent sur la maquette seule la vue logique a été testée.
Réalisation des tests
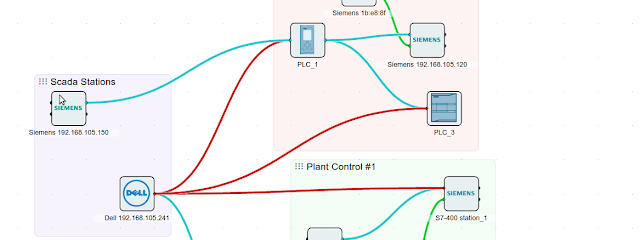
Suite à une capture en temps réel des trames, GRASSMARLIN a pu générer la vue logique suivante :
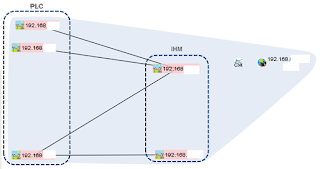
Le temps d’apparition des équipements sur la carte est quasi-instantané dès réception des flux. GRASSMARLIN identifie bien l’ensemble des équipements présents tout en donnant les protocoles de communications utilisés.
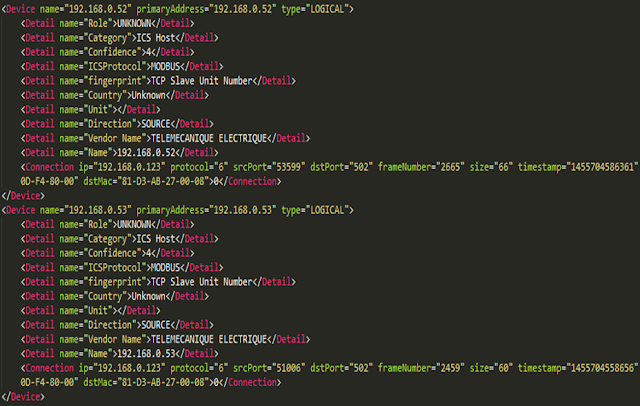
De même, un fichier XML de sortie est correctement généré à partir des fonctions d’export. Ce dernier résume l’ensemble des informations extraites par GRASSMARLIN et permet de réutiliser les données plus facilement :
Cependant, certaines limitations ont pu être observées :
- La non-concurrence des signatures
Si un équipement répond à plusieurs signatures alors seule une signature est détectée. Ceci peut notamment poser problème dans le cas d’une IHM qui communique potentiellement avec différents automates en utilisant plusieurs protocoles de communication. - Le manque de verbosité de certaines signatures
Les signatures comportent des champs descriptions dans leur Payload permettant de décrire au mieux le rôle de l’équipement identifié. Il est possible que ces champs soient laissés initialement vides ou peu renseignés ce qui peut compliquer la tâche d’identification. - Une analyse des échanges peu aboutie
GRASSMARLIN ne fournit actuellement que les premiers éléments d’analyse sur les communications : tailles des paquets, instants d’envois. Dans les pistes d’améliorations de sa fonction d’analyse nous pourrions par exemple citer l’implémentation d’une fonction de reconnaissance de cycles dans les échanges entre IHM et automates.
Conclusion
D’autres outils de détection passive de topologie sont disponibles sur le marché. Cependant GRASSMARLIN est actuellement l’un des rares, si ce n’est l’unique, à être destiné au SI industriels et à être Open-Source.
En comparaison un autre outil nommé NetworkMiner permet aussi de réaliser des topologies de réseaux en utilisant les signatures d’autres outils dont notamment : nmap, p0f et Ettercap . Néanmoins, ce dernier n’embarque pas à l’installation de signatures destinées aux protocoles industriels et n’est donc pas aussi précis que GRASSMARLIN.
Citons également la solution commerciale de Sentryo, dédiée elle aux SI industriels. Cette solution ne se contente pas de créer une cartographie à l’instant t, mais permet également d’alerter sur toutes variations par rapports aux communications habituelles, et ainsi de détecter des événements de sécurité. Lors de la démonstration à laquelle nous avons assistée, le niveau de détail fourni sur les automates (Schneider et Siemens à minima) était bien supérieur à celui qu’on peut actuellement obtenir avec Grassmarlin (marque, modèle, composants de l’automate et version du firmware par exemple).